坐标系及坐标变换
坐标系: 为确定机器人的位置和姿态而在机器人或空间上指定的位姿参考系统。
常见坐标系
轴坐标系
基坐标系
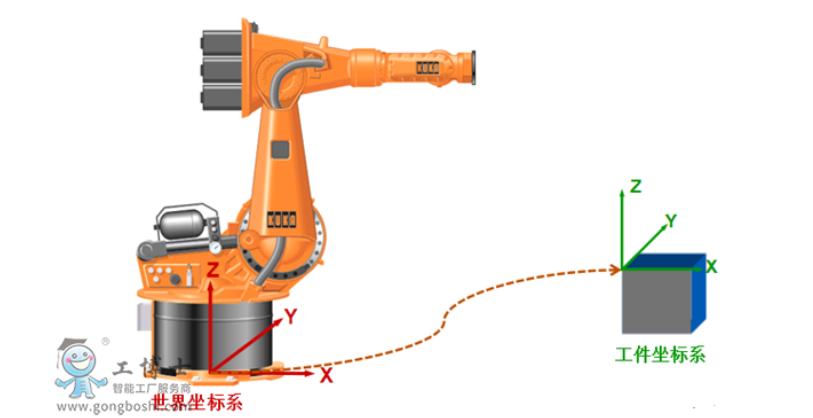
世界坐标系:
- 固定不变
- 所有使用者都知道世界坐标系的位置及方向。(即坐标系已知)
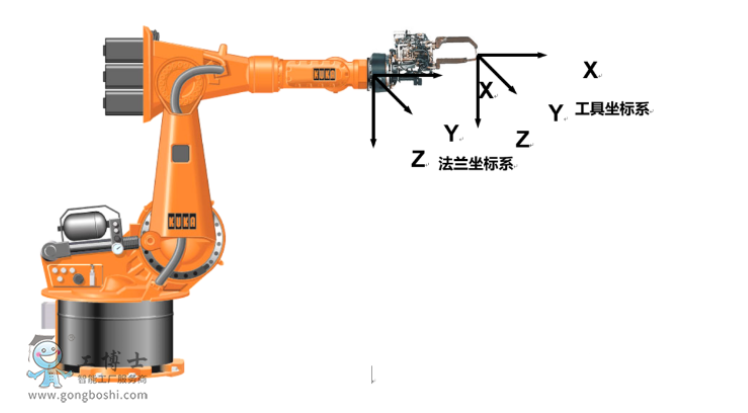
法兰坐标系:
工具坐标系
参考坐标系一般选择法兰坐标系
- 标定的误差主要取决于机器人DH参数的误差
工件坐标系
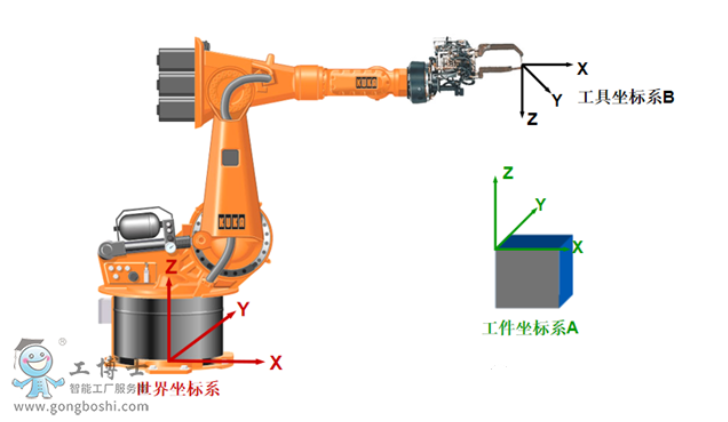
- 一个机器人可以对应多个工件坐标系
- 指明工件坐标系原点的位置
- 指明工件坐标系三个方向的情况
- 参考坐标系一般选择世界坐标系
参考坐标系的选择有两个前提条件:
- 两者相对位置固定不变
- 参考坐标系已知。